We set up the spring with 200 gram mass hanger, with the motion detector on the floor.

Determining the Spring Constant:
First we took the length of the spring and then used three trials to find the amount it stretches with different weights
 |
| Length of Spring |
 |
| Length of Spring with 100 grams |
 |
| Length of Spring with 200 grams |
 |
| Length of Spring with 300 grams |
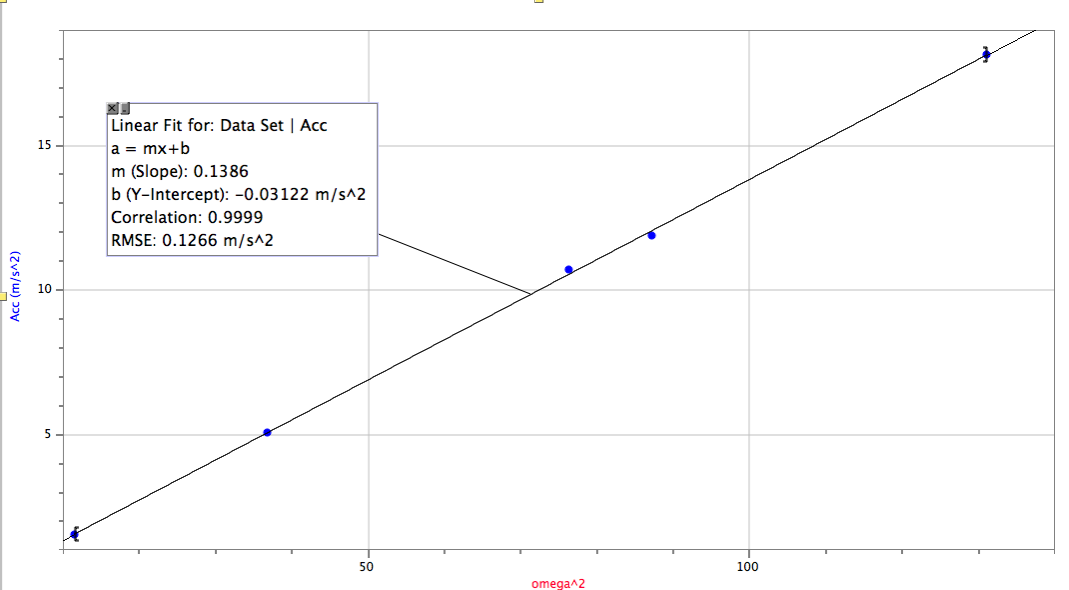
We then graphed the Force (mg) versus the Distance (amount the spring stretched). Using the formula F=kx, we found the k constant by finding the slope of the graph.
 |
| k = 11.01 N/m |
Next, we needed to set up the calculations to find the gravitational potential energy, elastic potential energy and kinetic energy of the system.
First we found the gravitational potential energy formula for the spring.
In the diagram below it shows all the energies we need to account for on the left and the gravitational potential energy formula derivation on the right.

Second we found the kinetic energy formula of the spring.

For both of these forumlas we need the mass of the spring:
 |
| Mass = 64 grams |
This was our reading when we took position and velocity versus time with LoggerPro's motion detector:
Now that we know there are 5 energies to account for and how to find them, we needed the velocity and position data to apply the formulas to. We took a reading of the oscillating spring with a 200 gram mass shown in the first picture as our set up.
 |
| Oscillation of Spring |
 |
| Mass and Spring KE and GPE were combined |
Once we created new columns to graph on LoggerPro, we then graphed total energy, adding all of the energies together.

As shown above, the total energy is close to being constant proving the conservation of energy as it transitions into different forms of gravitational, kinetic, and elastic energy.